
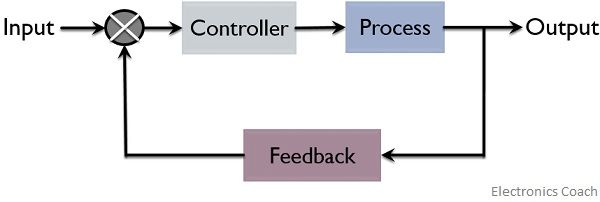
definitie: een gesloten – lusregelsysteem is een type besturingssysteem waarbij de regelende actie afhankelijk is van de gegenereerde output van het systeem. In eenvoudige woorden, in deze systemen, de output van het systeem controleert de input toegepast op het systeem.
de variatie in input volgens de output leidt tot nauwkeurigere systeemuitvoer., Zo wordt de controleerbaarheid in het closed-loop systeem bereikt door de output die door het gebruik van een terugkoppelingspad wordt gegenereerd.
gesloten-loopsystemen worden beschouwd als volautomatisch regelsysteem omdat het zo is ontworpen dat de bereikte output automatisch wordt vergeleken met de referentie-ingang om de vereiste output te hebben.
behoefte aan Closed-Loop Control System
we hebben het in ons vorige artikel al gehad over het besturingssysteem., Een besturingssysteem is een systeem dat is ontworpen om een gespecificeerde output door de actie van vereiste controlling te produceren.
De besturing die aan het systeem wordt geleverd, kan zowel output-onafhankelijk als output-afhankelijk zijn. Deze variatie leidt tot twee verschillende categorieën van controlesystemen.
een systeem waarbij de besturingsactie onafhankelijk is van de gegenereerde systeemuitvoer, wordt open-loop regelsysteem genoemd. Terwijl in een gesloten-lus systeem, de geproduceerde output controleert de werking van het systeem door het gebruik van feedback.,
in principe werd een gesloten-lussysteem ontworpen om de nadelen van een open-lussysteem te overwinnen. We weten dat open-loop systemen niet de mogelijkheid hebben om automatisch nauwkeurige output te leveren.
we zijn ons allemaal bewust van het feit dat de basisvereiste van het gebruik van een elektrisch of elektronisch systeem het genereren van de gewenste output is. En in elk systeem, als de meting niet wordt uitgevoerd en de vereiste output niet wordt bereikt, wordt het bijna onmogelijk om de nauwkeurige systeemrespons te krijgen.,
dus, om de nauwkeurige systeemrespons te hebben, is de eenvoudigste manier om de toegepaste input te vergelijken met de bereikte output. Dit helpt bij het bepalen van de fout die aanwezig is in het systeem. Daarom, zodra de fout is gemeten, kan deze worden gereduceerd tot de laagst mogelijke waarde om de gewenste output te krijgen.
in een closed-loop systeem wordt een feedbacksignaal aan de ingang gegeven. Dit feedbacksignaal en het referentie-ingangssignaal fungeren als systeemexcitatie om de gewenste reactie te krijgen., Op deze manier voert de uitgang de controlerende actie uit in een gesloten-lus systeem.
Wat is Feedback?
tot nu toe hebben we de term feedback zo vaak gebruikt. Maar men moet duidelijk weten wat feedback echt betekent?
in principe fungeert feedback als het kenmerk van het systeem dat een vergelijking mogelijk maakt tussen de bereikte output en de referentie-input van een systeem.,
een terugkoppeling is in het algemeen een deel van het uitgangssignaal dat aan het ingangssignaal wordt teruggegeven, zodat de twee kunnen worden vergeleken en de gewenste uitgang kan worden bereikt als de huidige uitgang variatie met de gewenste uitgang vertoont.
feedback loop wordt dus beschouwd als de belangrijkste parameter van een gesloten-loop regelsysteem.
Feedback in elk circuit kan over het algemeen van 2 types zijn:
1., Positieve Feedback: het type feedback in een besturingssysteem waarin het ingangssignaal en het feedbacksignaal in fase met elkaar zijn staat bekend als een positief feedbacksysteem.
in deze systemen wordt de referentie-ingang toegevoegd met het feedbacksignaal, waardoor de winst van het gehele systeem toeneemt.
2. Negatieve Feedback: in het geval van negatieve feedback, het ingangssignaal en het feedbacksignaal tonen out-of-phase relatie wrt elkaar.
dus worden het toegepaste ingangssignaal en het feedbacksignaal afgetrokken om het foutsignaal te krijgen., Dit leidt tot een vermindering van de algemene winst van het systeem.
dus kunnen we zeggen dat het de factor is die het belangrijkst verantwoordelijk is om de gewenste respons van een systeem te hebben.
werking van een gesloten-lussysteem
de afbeelding hier toont de gedetailleerde weergave van het blokdiagram van een gesloten – lussysteem:
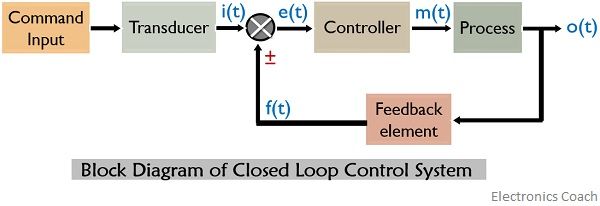
Hier kunnen we zien dat command input wordt gevoed naar een transducer.
Dit is zo omdat het niet altijd noodzakelijk is dat de beschikbare input door de controller aanvaardbaar is., In dergelijke gevallen kan de input dus niet rechtstreeks op het systeem worden toegepast. Zoals het moet worden gewijzigd van de ene vorm naar de andere, zodat het de rol van referentie-input voor het systeem kan uitvoeren.
Dit is de reden dat de input in eerste instantie wordt toegepast op de transducer, zodat deze kan worden gewijzigd in een vorm die door het systeem aanvaardbaar is, afhankelijk van de aard van de regelaar en het proces.
wanneer de regelaar het besturingssignaal produceert volgens de toegepaste input, vindt de vereiste actie volgens het gegenereerde signaal plaats binnen het systeem.
Dit leidt tot het genereren van een specifieke uitvoer., Maar het is noodzakelijk om de gegenereerde output te meten om uit te vinden of het de gewenste output is of niet. Dus, voor dit, wordt een deel van de bereikte output teruggegeven aan de input. Dit signaal werkt als een feedback signaal.
Dit feedbacksignaal, vergeleken met referentie-ingang, genereert een foutsignaal. Dit foutsignaal wordt verder verstrekt aan de controller die een gemanipuleerd signaal produceert (proportioneel aan foutsignaal) dat niets anders is dan een besturingssignaal dat het proces begeleidt om de fout te elimineren en zo de gewenste output te produceren.,
de bereikte output staat bekend als de gecontroleerde output van het systeem en is nauwkeurig.
Transferfunctie van het Closed-Loop Control System
Transferfunctie geeft het gedrag van het systeem aan zoals gedefinieerd als de wiskundige relatie tussen de input en output van het systeem.
de winst van het systeem bepaalt de verhouding tussen uitvoer en invoer. Zo kunnen we zeggen dat de output van het systeem het product is van overdrachtsfunctie en input.,
Overweeg het gesloten-lus systeem hieronder aangegeven:
![]()
Dus, voor de hierboven gegeven systeem,
![]()
Op het vervangen van de waarde van de E(s) in de 1e vergelijking
![]()
bij de omzetting
![]()
Dit is de overdrachtsfunctie van een closed-loop systeem met negatieve feedback.
voor een positief feedbacksysteem wordt het gegeven als:
![]()
voor een unity feedbacksysteem (i. e H(s) = 0) met een hoge waarde aan gain. De overdrachtsfunctie is eenheid.,