
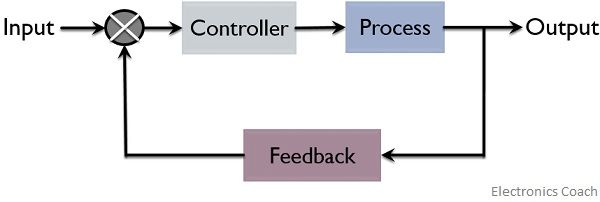
Definition: en sluten slinga styrsystem är en typ av styrsystem där den kontrollerande åtgärden visar beroende av den genererade produktionen av systemet. I enkla ord, i dessa system, styr systemets utmatning den ingång som appliceras på systemet.
variationen i ingång enligt utgången leder till att producera mer exakt systemutmatning., Således uppnås styrbarhet i det slutna systemet genom utgången som genereras genom att använda en återkopplingsväg.
slutna system anses vara helautomatiskt styrsystem eftersom det är utformat på ett sätt som den uppnådda utmatningen automatiskt jämförs med referensinmatningen för att ha den önskade utmatningen.
behov av sluten slinga styrsystem
Vi har redan diskuterat i vår tidigare artikel om styrsystemet., Ett styrsystem är ett system som är utformat för att producera en specificerad utgång genom verkan av erforderlig styrning.
Nu kan kontrollen som tillhandahålls till systemet antingen vara oberoende eller utgångsberoende. Denna variation leder till att ge två olika kategorier av styrsystem.
ett system där kontrollerande åtgärder är oberoende av den genererade systemutgången kallas open-loop control system. I ett slutet loop-system styr den producerade utmatningen systemets funktion genom att använda återkoppling.,
i grund och botten var ett slutet loop-system utformat för att övervinna nackdelarna i samband med ett open-loop-system. Vi vet att open-loop-system inte håller förmågan att automatiskt ge korrekt utgång.
Vi är alla medvetna om det faktum att det grundläggande kravet på att använda ett elektriskt eller elektroniskt system är att generera önskad utgång. Och i vilket system som helst, om mätningen inte utförs och den önskade utmatningen inte uppnås blir det nästan omöjligt att få det exakta systemsvaret.,
så, för att få det exakta systemsvaret är det enklaste sättet att jämföra den applicerade ingången med den uppnådda utmatningen. Detta hjälper till att bestämma felet som finns inuti systemet. Därför, när felet mäts då det kan reduceras till lägsta möjliga värde för att få önskad utgång.
i ett slutet loop-system tillhandahålls en återkopplingssignal till ingången. Denna återkopplingssignal och referensinmatningssignalen fungerar som system excitation för att få önskat svar., Således utför utmatningen den kontrollerande åtgärden i ett slutet loop-system.
Vad är Feedback?
hittills har vi använt termen feedback så många gånger. Men man måste tydligt veta vilken feedback som verkligen betyder?
så i princip återkoppling fungerar som kännetecknet för systemet som möjliggör jämförelse mellan uppnådda utdata och referensinmatning av ett system.,
en återkoppling är i allmänhet en del av utgångssignalen som ges tillbaka till ingångssignalen så att de två kan jämföras och önskad utgång kan uppnås om den nuvarande utgången visar variation med önskad utgång.
återkopplingsslingan betraktas således som nyckelparametern för ett slutet styrsystem.
återkoppling i någon krets kan i allmänhet vara av 2 typer:
1., Positiv återkoppling: typen av återkoppling i ett styrsystem där ingångssignalen och återkopplingssignalen befinner sig i fas med varandra kallas ett positivt återkopplingssystem.
i dessa system läggs referensinmatningen till med återkopplingssignalen, vilket ökar förstärkningen av det övergripande systemet.
2. Negativ återkoppling: vid negativ återkoppling visar ingångssignalen och återkopplingssignalen Out-of-phase-förhållandet varandra.
sålunda subtraheras den applicerade insignalen och återkopplingssignalen för att få felsignalen., Detta leder till en minskning av systemets totala vinst.
Således kan vi säga att det är den faktor som är viktigast ansvarig för att ha det önskade svaret hos ett system.
drift av ett slutet Loop-System
figuren här visar detaljerad blockdiagram representation av en sluten slinga styrsystem:
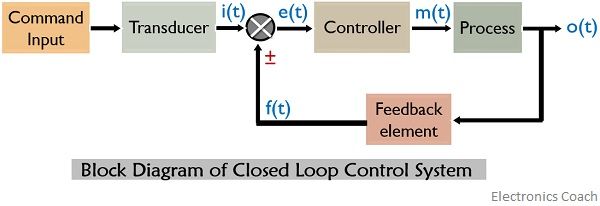
här som vi kan se att kommandoinmatning matas till en givare.
detta beror på att det inte alltid är nödvändigt att den tillgängliga ingången är acceptabel av regulatorn., I sådana fall kan inmatningen därför inte direkt tillämpas på systemet. Eftersom det måste ändras från en form till en annan så att den kan utföra rollen som referensinmatning för systemet.
detta är anledningen till att inmatningen initialt appliceras på givaren så att den kan ändras till en form som är acceptabel av systemet beroende på typ av styrenhet och process.
när regulatorn producerar styrsignalen enligt ingång som används, sker den nödvändiga åtgärden enligt den genererade signalen inuti systemet.
detta leder till generering av en specifik utgång., Men det är nödvändigt att mäta den genererade produktionen för att hitta om det är önskad utgång eller inte. Så, för detta ges en del av den uppnådda utgången tillbaka till ingången. Denna signal fungerar som en återkopplingssignal.
denna återkopplingssignal genererar, jämfört med referensinmatning, en felsignal. Denna felsignal tillhandahålls vidare till regulatorn som producerar en manipulerad signal (proportionell mot felsignal) vilket bara är en styrsignal som styr processen för att eliminera felet och därigenom producera önskad utgång.,
den uppnådda utsignalen är känd som den kontrollerade utsignalen från systemet och har noggrannhet.
överföringsfunktion för sluten slinga styrsystem
överföringsfunktion indikerar systemets beteende som det definieras som det matematiska förhållandet mellan systemets ingång och utgång.
förstärkningen av systemet definierar förhållandet mellan utdata och ingång. Således kan vi säga att systemets utgång är produkten av överföringsfunktion och inmatning.,
Tänk på det slutna systemet som anges nedan:
![]()
så, för det ovan angivna systemet,
![]()
om att ersätta värdet av E(s) i den 1: A ekvationen
![]()
vid transponering
![]()
det här är överföringsfunktionen för ett slutet loop-system med negativ feedback.
för ett positivt återkopplingssystem ges det som:
![]()
för ett Unity-återkopplingssystem (i.,e h(S) = 0) med ett högt värde av vinst. Överföringsfunktionen är enhet.,